 中文
中文 ENG
ENG





小优智能科技有限公司成立于2015年底,是一家专注于高精度3D机器视觉模组研发、生产及销售的高科技企业。
公司自主研发的3D机器视觉模组采用激光/DLP白光编码光栅结构光+双工业相机方案,还原物体三维信息,广泛应用于消费电子领域、工业领域和安防领域,具有精度高、速度快、成本低的优势。
结构光的分辨率 在较近使用范围内,结构光方案的分辨率会大大高于TOF方案。比如目前结构光方案的深度图最高可以做到1080p左右的分辨率了。
(2)帧率
结构光方案还有一个优势在于技术成熟,PrimeSense很早就把结构光技术用在kinect一代产品中了。 目前结构光技术有如下几种变种:一种是单目IR+投影红外点阵,另外一种是双目IR+投影红外点阵,这样相当于结构光+双目立体融合了,深度测量效果会比前者好一些,比如Intel RealSense R200采用的就是双目IR+投影红外点阵,不足之处就是体积较大。而单目IR+投影红外点阵的方案虽然体积较小,但是效果会差一点。
(5)计算复杂度

iPhone X的深度相机技术方案: 结构光原理的深度相机。具体来说是:单目IR+投影红外点阵+ASIC方案 。该方案在深度分辨率、深度测量精度上有较大优势,实时性处理和全天候工作也都有保障,功耗也相对较低,就是成本稍高了一些。
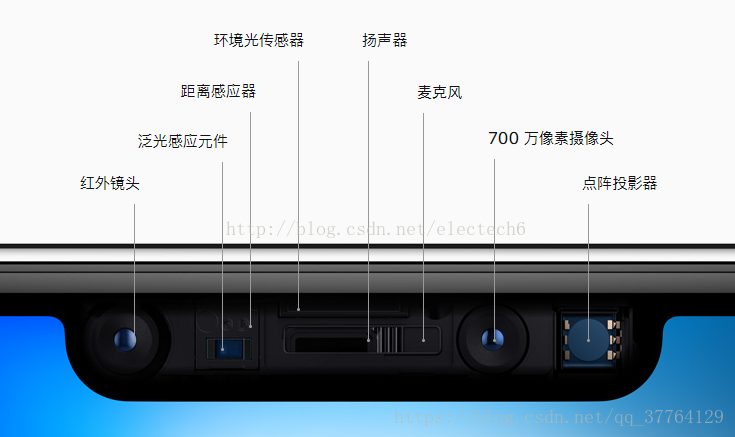
9月13日苹果发布了致敬十周年的新机型iPhone X,其中前置原深感(TrueDepth)相机引起了极大的舆论关注。该相机的构成如下图所示。从左到右,依次是红外镜头、泛光感应元件、距离传感器、环境光传感器、扬声器、麦克风、700万像素摄像头、点阵投影器。其中最有里程碑意义的当属红外镜头 + 点阵投影器 + RGB摄像头的组合。
转自:https://blog.csdn.net/electech6/article/details/78889057
https://blog.csdn.net/electech6/article/details/78348917
