 中文
中文 ENG
ENG


小优智能科技有限公司成立于2015年底,是一家专注于高精度3D机器视觉模组研发、生产及销售的高科技企业。
公司自主研发的3D机器视觉模组采用激光/DLP白光编码光栅结构光+双工业相机方案,还原物体三维信息,广泛应用于消费电子领域、工业领域和安防领域,具有精度高、速度快、成本低的优势。
深度相机四大坐标系
在计算机视觉中有四大坐标系,分别是世界坐标系、相机坐标系、图像坐标系和像素坐标系。这些坐标系间的转换对视觉系统的定位有着举足轻重的作用。
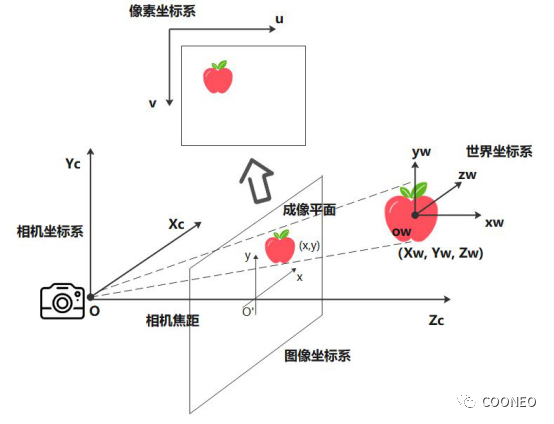
1、像素坐标系(u,v):指图像处理算法中用到的图像所在的2D像素坐标系。在图像上定义直角坐标系u-v,每一像素的坐标(u,v)分别是该像素在数组*中的列数和行数。
注:摄像机采集的数字图像在计算机内可以存储为数组。
2、图像坐标系(x,y):图像坐标系由相机的成像平面确定,X轴和Y轴与相机坐标轴平行。
3、相机坐标系(Xc,Yc,Zc):相机光心点为O,X轴和Y轴与图像平面坐标系的x轴和y轴平行,Z轴为相机的光轴,和成像平面垂直。光轴与图像平面的交点为图像主点O',由点O与轴组成的直角坐标系称为相机坐标系。OO'为相机焦距。
4、世界坐标系(Xw,Yw,Zw):世界坐标系是系统的绝对坐标系,在没有建立用户坐标系之前画面上所有点的坐标都是以该坐标系的原点来确定各自的位置的。
坐标系间的转换
坐标系转换即将世界坐标系中的3D真实点转换到通常进行图像处理时所使用的以像素为单位的2D图像上。
像素坐标系与图像坐标系
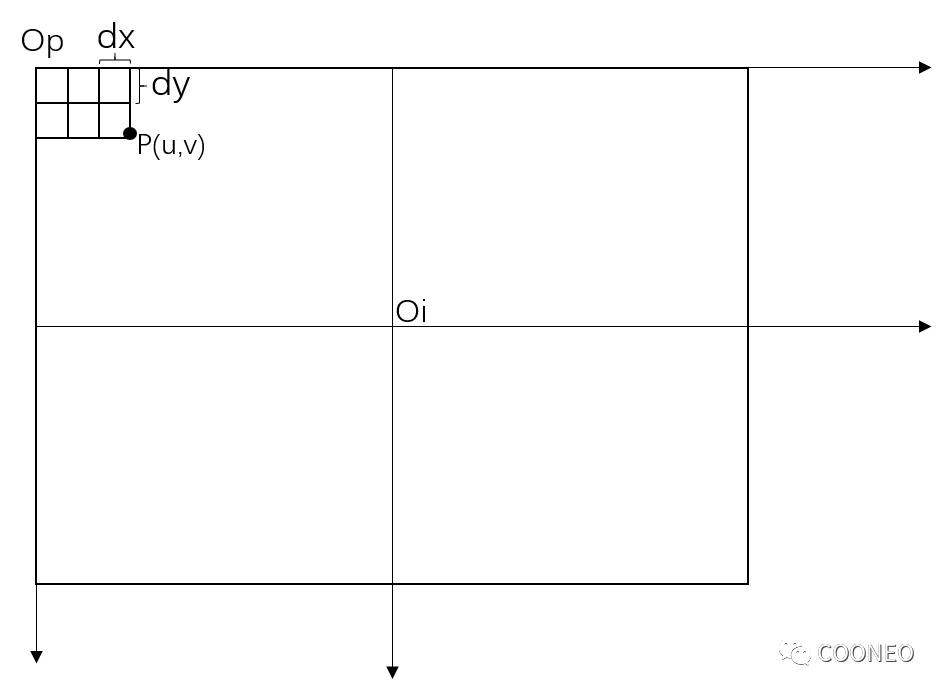
像素坐标系和图像坐标系都在成像平面上,图像坐标系的原点为相机光轴与成像平面的交点,而像素坐标系的原点位于图像左上角,即两者存在着平移变化。
图像坐标系的单位通常是mm,而像素坐标系的单位是pixel。感光芯片上每个像素点的实际物理大小dx,dy是相机的内部参数,是连接像素坐标系到图像坐标系的桥梁,即像素坐标系与图像坐标系间存在着缩放变化。也就是说通过比例变化和缩放变化可以将像素坐标系转换成图像坐标系。
图像坐标系与相机坐标系
从相机坐标系到图像坐标系是一个三维坐标到二维坐标(3D->2D)的过程,称之为透视投影变换,其原理与小孔成像原理相同。通过相机内参,利用相似三角形原理,可实现图像坐标与相机坐标系间的转换。
世界坐标系与相机坐标系
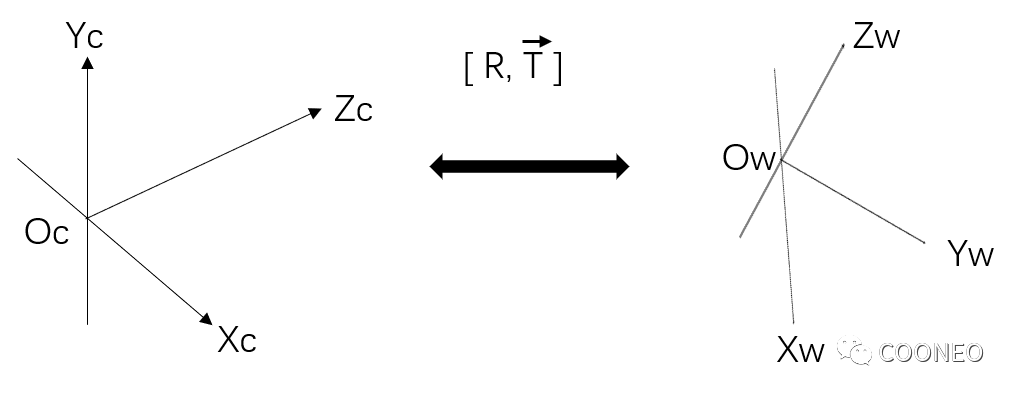
世界坐标与相机坐标都是三维坐标,遵循右手定则且三轴互相垂直。通常通过旋转和平移的变化(外参矩阵)可以实现两个坐标系的转换。
