 中文
中文 ENG
ENG


小优智能科技有限公司成立于2015年底,是一家专注于高精度3D机器视觉模组研发、生产及销售的高科技企业。
公司自主研发的3D机器视觉模组采用激光/DLP白光编码光栅结构光+双工业相机方案,还原物体三维信息,广泛应用于消费电子领域、工业领域和安防领域,具有精度高、速度快、成本低的优势。
为了便于理解,下面将相机模型从物理成像与数学模型进行介绍。
1、相机模型(物理模型)
针孔相机的模型:三维世界中的物体,经过相机成像系统,变成二维图像过程如图1所示。
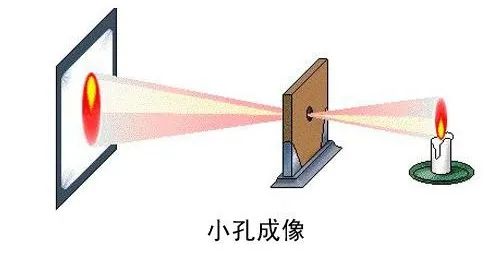
图1
物理模型如图1所示,其实在整个成像(相机拍摄)过程,就是一个小孔成像的过程,不涉及到四个坐标系以及坐标系的转换;现实世界中物体通过镜头在相机sensor产生影像,并进行模数转换,得到的数字图像,整个过程没有数学计算;然后可以对得到的图像各种进行处理,如图像识别、目标检测、图像分割等。
如果仅做图像层面的处理,了解这么多就足够了。在图像测量过程以及机器视觉应用中,我们需要知道像素点与现实世界的对应关系,这时我们需要对相机成像过程进行建模,必须建立相机成像的几何模型,求出这个模型的参数。
2、相机模型(数学模型/几何模型)
2.1坐标系
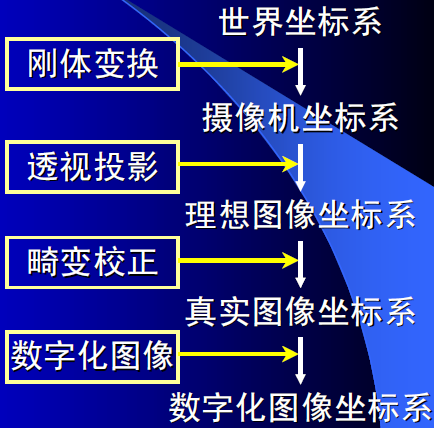
确定空间某点的三维几何位置与其在图像中对应点之间的相互关系,相机成像过程建模,必须建立相机成像的几何模型(各个坐标系),这些坐标系之间的转换参数就是相机参数。首先引入四个坐标系,坐标系只是对相机建模的工具,并不是平白无故构造的。
世界坐标系:世界坐标系是随着物体的大小和位置变化的,单位是长度单位;坐标系用 表示。由于摄像机可安放在环境中的任意位置,在环境中选择一个基准坐标系来描述摄像机的位置,并用它描述环境中任何物体的位置,该坐标系称为世界坐标系。摄像机坐标系与世界坐标系之间的关系可以用旋转矩阵与平移向量来描述。
表示。由于摄像机可安放在环境中的任意位置,在环境中选择一个基准坐标系来描述摄像机的位置,并用它描述环境中任何物体的位置,该坐标系称为世界坐标系。摄像机坐标系与世界坐标系之间的关系可以用旋转矩阵与平移向量来描述。
相机坐标系:相机坐标系的原点为光心,单位是长度单位;坐标系用 表示。
表示。
图像坐标系:图像坐标系的原点为主点(光轴与图像平面的交点),单位是长度单位;坐标系用X、Y表示。
像素坐标系:像素坐标系的原点 图像的左上角;以像素为单位;坐标系用 表示。
表示。
2.2相机几何模型
建立坐标系后,相机成像过程抽象为坐标转换关系,如下图2所示,三维到二维的成像过程可以用数学语言描述。
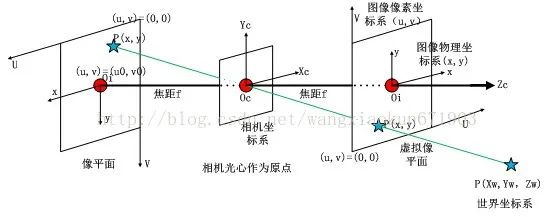
图2
(1) 针孔中的点被称为投影中心;
(2) 光轴与图像平面的交点被称为主点;
成像仪中心通常不在光轴上,即主点与成像仪中心有偏差;因此引入两个新的参数 ,
, 表示主点在像素坐标系的位置坐标。
表示主点在像素坐标系的位置坐标。 一般不是正好是图像分辨率的一半,其是有偏差的,一般越好的摄像头则其越接近于分辨率的一半。
一般不是正好是图像分辨率的一半,其是有偏差的,一般越好的摄像头则其越接近于分辨率的一半。
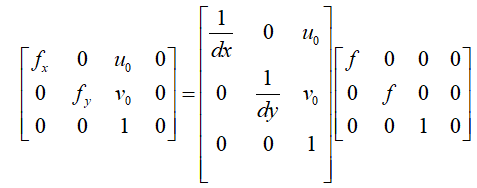
2.3相机数学公式模型
从世界坐标系到像素坐标系的转换过程如下:世界坐标系通过外参矩阵转换到相机坐标系,相机坐标系通过内参矩阵转换到图像像素坐标系(这一步是通过两步完成的,(1)相机坐标系通过焦距对角矩阵和畸变系数转换到图像物理坐标系,(2)图像物理坐标系通过像素转换矩阵转换到像素坐标系中)。转换过程和公式如下:
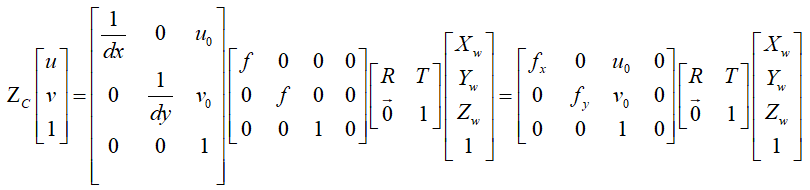
内参矩阵可以表示为:
外参矩阵表示为: ,其中R为旋转矩阵,T为平移向量,详细计算如下:
,其中R为旋转矩阵,T为平移向量,详细计算如下:

相机光学成像过程的四个步骤:
本文仅做学术分享,如有侵权,请联系删文
